Funding
To support my research at Shenzhen University, China (2021-...), I was awarded the following grants.
| Period | Amount | Description | Organization | Role | Type |
|---|---|---|---|---|---|
| 2022-2024 | 1,000,000 RMB | Startup funding for high level researchers | City / University | Investigator | Municipal / University |
Previously,while working at Harbin Institute of Technology (Shenzhen), China (2015 - 2021), I received the following grants.
| Period | Amount | Description | Organization | Role | Type |
|---|---|---|---|---|---|
| 2019-2020 | 470,000 RMB | Project #YBN2019075036 |
Major Chinese technology company | Investigator | Industry |
| 2017-2018 | 66,666 RMB | Project | Feidai | Investigator | Industry |
| 2018 | 500,000 RMB | Funding from Guangdong province for talents | Guangdong | Investigaor | Provincial |
| 2016-... | 4,000,000 RMB (approx.: $CAD 800,000) |
分析和序列预测算法开发及应用 Algorithms for Sequence Analysis and Prediction with Applications |
NSFC / HITSZ |
Investigator | National |
| 2017 | 200,000 RMB (approx.: $CAD 40,000) |
Nanshan funding for talents | Nanshan | Investigator | Municipal |
| 2015 | 200,000 RMB (approx.: $CAD 40,000) |
Initiating fund from HITSZ | HITSZ | Investigator | University |
To support my research at University of Moncton, Canada (2011-2015), I was awarded the following grants.
| Period | Amount | Description | Organization | Role | Type |
|---|---|---|---|---|---|
| 2014 | CAD $ 5,000 | IRAP research project with a company "Prediction of Online Auctions Prices" |
IRAP | co-supervisor from university | National |
| 2014 | CAD $ 15,000 | MITACS research project with a company "Semantic classification of short texts" |
MITACS | supervisor from university | National |
| 2013 - 2018 | CAD$ 100,000 |
Discovery grant "Algorithms, data structures and visualization for sequence analysis and prediction" |
NSERC (the national research funding agency of Canada) |
Principal investigator | National |
| 2013 | CAD$ 3000 | Startup fund from university (FESR) | U. Moncton | Principal investigator |
University |
| 2012 | CAD$ 5000 | Startup fund from faculty of sciences | U. Moncton | Principal investigator |
University |
Grants
During my graduate studies and work as post-doctoral researcher (2003-2011), I received several grants, which totally are worth more than 223,000 $ CAD (approx. 1,200,000 RMB).
| Period | Amount | Description | Organization | Type |
|---|---|---|---|---|
| 2010-2012 | CAD$ 60,000 | Post-doctoral Fellowship | FQRNT | Provincial |
| 2007-2010 | CAD$ 105,000 | Alexander Graham Bell Canada Graduate Scholarship for Ph.D
students (to only about 300 students for the whole Canada each year) |
NSERC | National |
| 2006-2008 | CAD$ 53,333 | Research Fellowship for Ph.D. students | FQRNT | Provincial |
| 2005 | CAD$ 5,000 | University of Sherbrooke grant (M.Sc.) | Univ. of Sherbrooke | University |
Some projects
Descriptions of some previous or current projects are given below.
(1) Algorithms for COVID-19 Genome Analysis and Public Reaction Analysis (2020-..)
My research team recently published a few papers related to the COVID-19 coronavirus. We applied some pattern mining algorithms, sequence prediction models, alignment free tools, and designed some mutation analysis algorithm to analyze the COVID-19 genome. The main papers are:
- Nawaz, S., Fournier-Viger, P., Shojaee, A., Fujita, H. (2021). Using Artificial Intelligence Techniques for COVID-19 Genome Analysis. Applied Intelligence, to appear. [source code and data + SPMF]
- Nawaz, M. S., Fournier-Viger, P., Niu, X., Wu, Y. (2021). COVID-19 Genome Analysis using Alignment-Free Methods. Proc. 34thd Intern. Conf. on Industrial, Engineering and Other Applications of Applied Intelligent Systems (IEA AIE 2021), Springer LNAI, 12 pages
- Noor, S., Guo, Y., Shah, S. H. H., Fournier-Viger, P., Nawaz, M. S. (2020). Analysis of Public Reaction to the Novel Coronavirus (COVID-19) Outbreak on Twitter. Kybernetes, Emerald Publishing
(2) Algorithms for sequence analysis and sequence prediction (2010-)
Algorithms to discover sequential patterns
A sequence is an ordered list of symbols. A sequence is a general concept that exists in many domains. For example, in the domain of bioinformatics, protein sequences, microarray data and DNA fragments are sequences. Examples from other domains are sequences of webpages visited by users, sequences of transactions made by customers in a store, sequences of weather observations, educational data or medical record data.
To analyse sequences, a popular technique is to apply algorithms to discover sequential patterns such as PrefixSpan, SPAM, Spade and AprioriALL. I have developped multiple algorithms for discovering sequential patterns in sequences such as:
- TKS: an efficient algorithm to discover top-k sequential patterns in a set of sequences (ADMA 2013)
- MaxSP: an efficient algorithm to discover maximal sequential patterns in a set of sequences (ADMA 2013)
- TNS: an algorithm for discovering top-k non redundant sequential rules (2013)
- RuleGrowth : a very efficient algorithm for mining sequential rules that uses a pattern-growth approach together with a new process for rule discovery called "rule expansion" (2011).
- TopSeqRules: an algorithm for discovering the top-k most frequent sequential rules in a sequence database, where k is set by the user. (2011)
- TRuleGrowth : an algorithm for mining sequential rules while considering a maximum time duration constraint (a.k.a window size constraint). (2012)
- CMRules and CMDeo: algorithms to discover sequential rules that respectively use an association rule based approach and a levelwise approach (2010).
- An algorithm to discover sequential pattern from a set of sequences with anotations and time constraints (best paper award at MICAI 2008)
These algorithms have been applied in various domains such as e-learning (in the CanadarmTutor project), for webclick stream analysis (Fournier-Viger et al., 2012), manufacturing simulation (Kamsu-Foguem et al., 2013), quality control (Bogon et al., 2012), analyzing visitor movements (Orellana, 2011), modelling trends on social web (Christiansen, 2013) and restaurant recommendation (Han et al., 2012). Source code of the algorithms have been released as part of the open-source data mining library SPMF.
Algorithms to discover association rules and itemsets
I have also developped or collaborated on several algorithms for discovering itemsets and associations in transaction databases such as:
- Memory-Efficient Itemset Tree: a new data structure for online targeted association rule mining (ADMA, 2013)
- TopKRules (2012): an efficient algorithm to discover top-k association rules.
- TNR (2012): an efficient algorithm to discover top-k non redundant association rules.
- CHUD (ICDM, 2011): an efficient algorithm to discover closed+ high utility itemsets
Algorithms for sequence prediction
I have also made contribution on the topic of sequence prediction.
- Compact Prediction Tree (Gueniche et al, 2013): a new data structure that provide more accurate sequence prediction than popular approaches such as All-K-Markov, Dependency Graph and PPM for data such as web click stream.
- A sequential rule-based sequence prediction algorithm (ADMA 2012).
| [1] Gueniche, T., Fournier-Viger, P., Tseng, V.-S. (2013). Compact Prediction Tree: A Lossless Model for Accurate Sequence Prediction. Proc. 9th International Conference on Advanced Data Mining and Applications (ADMA 2013), Springer, LNAI, 12 pages (to appear). | |
| [2] Fournier-Viger, P., Wu, C.-W., Tseng, V.-S. (2013). Mining Maximal Sequential Patterns without Candidate Maintenance. Proc. 9th International Conference on Advanced Data Mining and Applications (ADMA 2013), Springer, LNAI, 12 pages (to appear). | |
| [3] Fournier-Viger, P., Gomariz, A., Gueniche, T., Mwamikazi, E., Thomas, R. (2013). Efficient Mining of Top-K Sequential Patterns. Proc. 9th International Conference on Advanced Data Mining and Applications (ADMA 2013), Springer, LNAI, 12 pages (to appear). | |
| [4] Fournier-Viger, P., Mwamikazi, E., Gueniche, T., Faghihi, U. (2013). Memory Efficient Itemset Tree for Targeted Association Rule Mining. Proc. 9th International Conference on Advanced Data Mining and Applications (ADMA 2013), Springer, LNAI, 12 pages (to appear). | |
| [5] Fournier-Viger, P., Tseng, V. S. (2013). TNS: Mining Top-K Non-Redundant Sequential Rules. Proc. 28th Symposium on Applied Computing (ACM SAC 2013). ACM Press, pp. 164-166. | |
| [6] Fournier-Viger, P., Tseng, V.S. (2012). Mining Top-K Non-Redundant Association Rules. Proc. 20th International Symposium on Methodologies for Intelligent Systems (ISMIS 2012), Springer, LNCS 7661, pp. 31- 40. | |
| [7] Fournier-Viger, P. Gueniche, T., Tseng, V.S. (2012). Using Partially-Ordered Sequential Rules to Generate More Accurate Sequence Prediction. Proc. 8th International Conference on Advanced Data Mining and Applications (ADMA 2012), Springer LNAI 7713, pp.431-442. | |
| [8] Fournier-Viger, P., Faghihi, U., Nkambou, R., Mephu Nguifo, E. (2012). CMRules: Mining Sequential Rules Common to Several Sequences. Knowledge-based Systems, Elsevier, 25(1): 63-76. | |
| [9] Fournier-Viger, P., Wu, C.-W., Tseng, V.S., Nkambou, R. (2012). Mining Sequential Rules Common to Several Sequences with the Window Size Constraint. Proceedings of the 25th Canadian Conf. on Artificial Intelligence (AI 2012), Springer, LNAI 7310, pp.299-304. | |
| [10]Wu, C.-W., Fournier-Viger, P., Yu., P. S., Tseng, V. S. (2011). Efficient Mining of a Concise and Lossless Representation of High Utility Itemsets. Proceedings of the 11th IEEE International Conference on Data Mining (ICDM 2011). IEEE CS Press, pp.824-833. | |
| [11] Fournier-Viger, P. & Tseng, V. S. (2011). Mining Top-K Sequential Rules. Proceedings of the 7th Intern. Conf. on Advanced Data Mining and Applications (ADMA 2011). LNAI 7121, Springer, pp.180-194. | |
| [12] Fournier-Viger, P., Nkambou, R. &
Tseng, V. S. (2011). RuleGrowth:
Mining Sequential Rules Common to Several Sequences by Pattern-Growth.
Proceedings of the 26th Symposium on Applied Computing (ACM SAC 2011).
ACM Press, pp. 954-959. [13] Fournier-Viger, P., Lin, J. C.-W., Kiran, R. U., Koh, Y. S., Thomas, R. (2017). A Survey of Sequential Pattern Mining. Data Science and Pattern Recognition, vol. 1(1), pp. 54-77. |
|
| (see the "publications" section of the webiste for more articles) |
(3) Algorithms for Authorship Attributions (2016)
We designed some algorithms to automatically guess the authors of some text documents. This is a classification problem where we have a training set of documents from known authors and want to guess the author of an anonymous document. To perform this task we have used a sequential pattern mining based approach. We extracted sequential patterns of part-of-speeches that represent well the writing style of each author. We published a few papers on this topic:
- Pokou J. M., Fournier-Viger, P., Moghrabi, C. (2016). Authorship Attribution Using Small Sets of Frequent Part-of-Speech Skip-grams. Proc. 29th Intern. Florida Artificial Intelligence Research Society Conference (FLAIRS 29), AAAI Press, pp. 86-91
- Pokou J. M., Fournier-Viger, P., Moghrabi, C. (2016). Using Frequent Fixed or Variable-Length POS Ngrams or Skip-grams for Blog Authorship Attribution . Proc. 12th Intern. Conf. on Artificial Intelligence Applications and Innovations (AIAI 2016), Springer LNAI, pp. 63-74 [datasets].
- Pokou J. M., Fournier-Viger, P., Moghrabi, C. (2016). Authorship Attribution using Variable-Length Part-of-Speech Patterns. Proc. 7th Intern. Conf. on Agents and Artificial Intelligence (ICAART 2016), pp. 354-361
(4) Data Mining Algorithms with Applications in Tutoring Agents (2008-2011)
In my recent works, I have developped data mining algorithms to enhance the capabilities of intelligent agents. In particular, I have explored the possibility of improving the behavior of agents by discovering temporal patterns in their behavior.
For this purpose, I have devopped an original sequential pattern mining (SPM) algorithm providing several more features than classical SPM algorithms such as handling time constraints, valued items, dimensional information and eliminating some form of redundancy [1].
This algorithm has been applied in two tutoring agents integrated in the CanadarmTutor tutoring system. First, we have build an agent that can learn a task by observation. It proceeds by recording the behavior of other agents and then extracts frequent patterns from this data [1, 2]. In our application, this allowed the tutoring agent to learn domain knowledge by observing humans. The agent can then use this knowledge to provide tailored assistance to learners. Second, we have built an agent that learn from its own behavior by reusing behaviors that lead to self-satisfaction [2, 3]. This allow an author to provide the agent with different behaviors and to let the agent learn automatically which one is more succesful in different situations.
Other works with data mining and agents are currently in progress.
| [1] | Fournier-Viger, P., Nkambou, R & Mephu Nguifo, E. (2008), A Knowledge Discovery Framework for Learning Task Models from User Interactions in Intelligent Tutoring Systems. Proceedings of the 7th Mexican International Conference on Artificial Intelligence (MICAI 2008). LNAI 5317, Springer, pp. 765-778. |
| [2] | Fournier-Viger, P., Nkambou, R., Faghihi, U. & Mephu Nguifo, E. (2009). Mining Temporal Patterns to Improve Agents Behavior: Two Case Studies. In Cao, L.(Ed.) Data Mining and Multiagent Integration, Springer, 15 pages (to appear). |
| [3] | Faghihi, U., Fournier-Viger, P., Nkambou, R. & Poirier, P. (2009). A Generic Episodic Learning Model Implemented in a Cognitive Agent by Means of Temporal Pattern Mining. Proceedings of the 22nd Intern.Conf. on Industrial, Engineering and Other Applications of Applied Intelligent Systems (IAE-AIE 2009), LNAI 5579, Springer, pp. 545-555. |
(5) Evaluating Spatial Reasoning in Intelligent Tutoring Systems (2007-2011)
For many real-life tasks such as driving or operating a robot, the spatial dimension is very important. For learning such tasks, relying on a simulated virtual environment can be beneficial, as it can allows reproducing complex scenarios at a low cost. However current virtual learning environment cannot generate scenarios that are tailored to each learner spatial representations and skills, to help learners develop their spatial reasonning capabilities.
Therefore, the goal of this project is to develop (1) a new cognitive model for evaluating spatial skills and representations of learners performing tasks with a simulator-based tutoring system, and (2) to propose mechanisms for using this insight to automatically generate personalized scenarios and feedback that will help learners to improve their spatial representations and reasoning skills.
To achieve our goal, we have extended a cognitive model that we have developped in previous work ( see project 3), based on the latest researches on spatial cognition. The extended model [1, 2, 3] was applied in the CanadarmTutor tutoring system (cf. fig. 1) to automatically evaluate spatial representations and skills and provide custom assistance to learners that learn to operate the Canadarm2 robotic arm.
Main publications
| [1] | Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008). Evaluating Spatial Representations and Skills in a Simulator-Based Tutoring System. IEEE Transactions on Learning Technologies, vol. 1, no. 1, pp. 63-74, Jan-Mar, 2008. |
| [2] | Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008), Evaluating Spatial Knowledge through Problem-Solving in Virtual Learning Environments. Proceedings of the Third European Conference on Technology Enhanced Learning (EC-TEL 2008). LNCS 5192, Springer, pp 15-26. |
| [3] | Fournier-Viger, P., Nkambou, R., Mayers, A. and Dubois, D. (2007), Automatic Evaluation of Spatial Representations for Complex Robotic Arms Manipulations. Proceedings of the 7th IEEE International Conference on Advanced Learning Technologies (ICALT 2007), pp: 279-281. |
(6) A Cognitive and Ontology-Based Model for Building Glass-Box Learning Objects (2003- 2005)
In e-learning, a popular solution to make teaching material reusable is to design and package it as one or more learning objects that can be stored in learning objects repositories. Learning objects are in brief learning contents that are annotated with metadata. However, learning objects are "black-boxes" as they provide few information about how their content will be used by learners. Therefore, it is difficult to build virtual learning environments that can generate tailored assistance to learner using a particular learning object.
To adress this issue, we proposed to extend the concept of learning objects, by providing another layer of metadata that describes the cognitive processes of learners that will perform learning activities with a learning object. The proposed model allow to define learning objects that provides enough information about their usage so that a virtual agent can offer tailored assistance during learning activites.
The proposed model offers three layers of knowledge for the description of learning objects:
- The first layer describes the knowledge with ontologies, to facilitate the separation of the knowledge in multiple files, their interpretation as a whole, and provide a basis for logical reasoning.
- The second layer describes cognitive processes to permit building learning objects that can be used for providing automated personnalized assistance.
- The third layer builds learning objects upon the two first layers, by relying on current e-learning standards (IEEE LOM and IMS-CP).
The model was applied in Redbool, a tutoring system for learning to simplify Boolean expressions [1, 2] (cf. fig. 2). An extended version of the model was applied in RomanTutor / CanadarmTutor, a tutoring system for learning to operate a robotic arm (see project 2).
Main publications
| [1] | Fournier-Viger P., Najjar, M., Mayers, A. & Nkambou, R. (2006). A Cognitive and Logic based Model for Building Glass-box Learning Objects. Interdisciplinary Journal of Knowledge and Learning Objects, Vol. 2. pp: 77-94. |
| [2] | Fournier-Viger P., Najjar, M., Mayers, A. & Nkambou R. (2006). From Black-box Learning Objects to Glass-Box Learning Objects. Proc. 8th Intern. Conf. on Intelligent Tutoring Systems (ITS 2006). LNCS 4053, pp: 258-267, Springer-Verlag, Berlin. |
| [3] | RedBool is a software program developped by the GDAC and ASTUS research team, that involved the participation of many B.Sc./M.Sc/Ph.D. students at University of Sherbrooke and University of Quebec at Montreal. |
(7) A Cognitive Model for Building "Cognitive Tutors" (2006-2010)
To build learning environments that can provide tailored assistance to learners during learning activities, a popular solution is to model the cognitive processes of learners with a cognitive model. It allows a tutoring system to closely follow the reasoning of learners to then generate tailored assistance. This is the idea originally proposed in the Cognitive Tutors by Anderson et al. (1995). However, their cognitive model can be improved in several ways.
For this reason, we have decided to build an alternative cognitive model. The model is directly inspired by the work on Cognitive Tutors. But it provides several originalities such as:
- providing a better evaluation of declarative (semantic) knowledge and spatial reasoning (see project 2) [1,2]
- and incorporating ontologies for improving reusability of knowledge and building glass-box learning objects (see project 3) [3].
This work has resulted in a knowledge representation framework [1,2,3] comprising mainly:
- knowledge structures for representing cognitive processes
- an interpreter to simulate cognitive processes described with the knowledge structures
- a model-tracer that use the interpreter for determining what a learner is actually doing according to the knowledge structures.
The current version of the framework (2006-2010), described in [1,2] has been applied in the following projects:
- RomanTutor / CanadarmTutor, a tutoring system for learning to operate the Canadarm2 robotic arm (figure 1) [1].
- the latest version of an authoring tool for the knowledge structures (figure 2) (P. Fournier-Viger, 2007)
- Redbool, a tutoring system for learning to reduce boolean expressions (figure 3) ([1], 2005-2006)
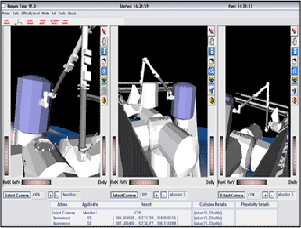
Fig 1. The CanadarmTutor / RomanTutor Tutoring System
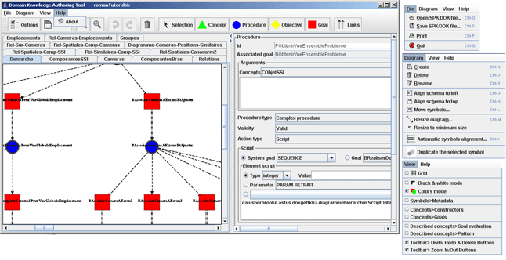
Fig 2. The Latest Version of the Authoring Tool
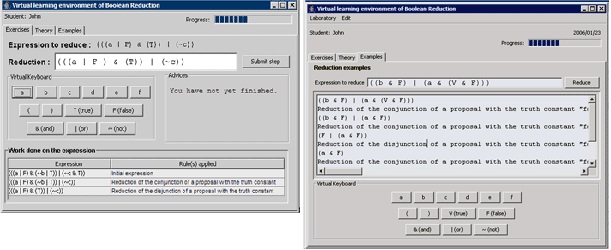
Fig 3. The Redbool Tutoring System
Earlier versions(2003-2006) of the knowledge structures and interpreter have been designed with André Mayers and have been described in my M.Sc. Dissertation (P. Fournier-Viger, 2005). They have been used in several projects including:
- an early version of the GNT tutoring system (figure 4) for learning to perform restriction, digestion and reconstructing DNA in a genetic lab (X. Zhao, M.Sc. 2004)
- an early version of Redbool tutoring system (figure 5) (M. Najjar, P. Fournier-Viger, A. Mayers et al., 2003-2004)
- an early version of the authoring tool for the knowledge structures (M. Najjar, P. Fournier-Viger et al., 2005)
- TiramisuSimulation, a cognitive simulation of a person cooking a tiramisu that is being interrupted during the task (figure 6) (M. Najjar, P. Fournier-Viger, J.F. Lebeau et al., 2006)
- an early version of the ACCC tutoring system for DC Circuit Analysis (figure 7) (A. Abdessemed, J.F. Lebeau et al., 2006).
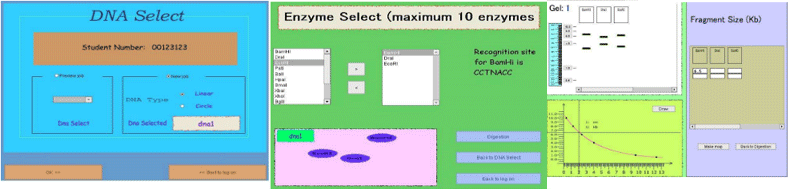
Fig 4. An Early Version of the GNT Tutoring System
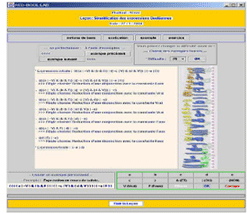
Fig 5. An Early Version of the Redbool Tutoring System
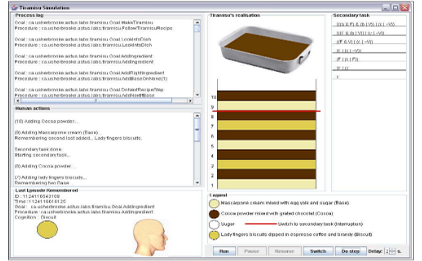
Fig 6. A Cognitive Simulation of the Realisation of a Tiramisu
Cake
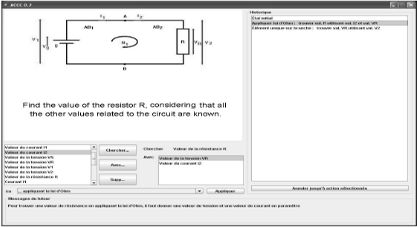
Fig 7. An Early Version of a Tutoring System for DC
Circuit Analysis
Main publications
| [1] | Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008). Evaluating Spatial Representations and Skills in a Simulator-Based Tutoring Syste. IEEE Transactions on Learning Technologies, vol. 1, no. 1, pp. 63-74, Jan-Mar, 2008. |
| [2] | Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008), A Framework for Evaluating Semantic Knowledge in Problem-Solving-Based Intelligent Tutoring Systems. Proceedings of the 21th International Florida Artificial Intelligence Research Society Conference (FLAIRS 2008). AAAI press, pp. 409-414. |
| [3] | Fournier-Viger P., Najjar, M., Mayers, A. & Nkambou, R. (2006). A Cognitive and Logic based Model for Building Glass-box Learning Objects. Interdisciplinary Journal of Knowledge and Learning Objects, Vol. 2. pp: 77-94. |