CanadarmTutor
Introduction
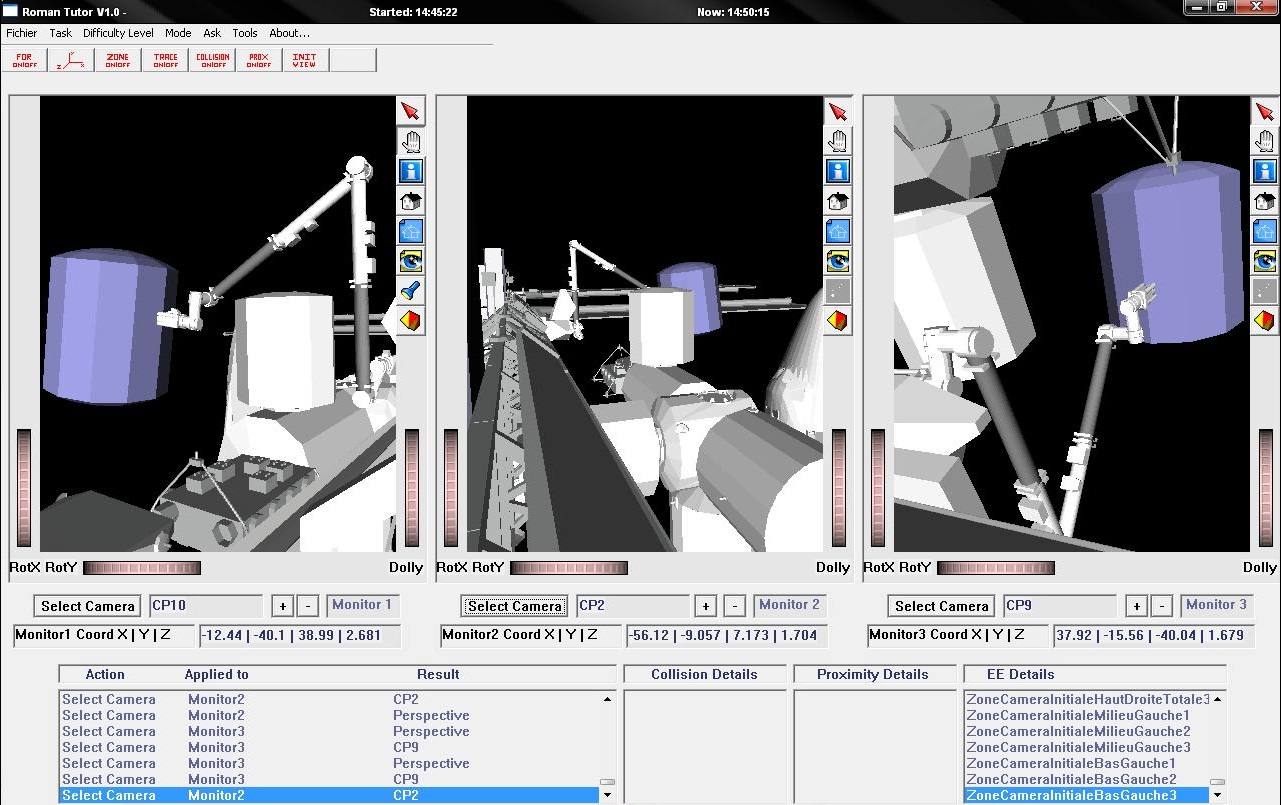
CanadarmTutor is an intelligent tutoring systems developped by the GDAC (UQAM) and Planiart (U. of Sherbrooke) labs. It is designed for training astronauts to the manipulation of Canadarm2. Canadarm2 is a seven degrees of freedom robotic arm deployed on the international space station.
CanadarmTutor offers a 3D simulation of the space station. The user can operates the arm with the keyboard and select cameras and other parameters with the mouse.
CanadarmTutor incorporates several "intelligent modules" to provide tailored assistance to learners. These modules can generate advices, demonstrations, custom exercices, hints, etc.
To design these intelligent modules, several research projects have been carried in CanadarmTutor, sometimes independently. For this reason, there exists a few different versions of CanadarmTutor. This page gives an overview of the version that I have worked on during my Ph.D at the GDAC lab.
Architecture
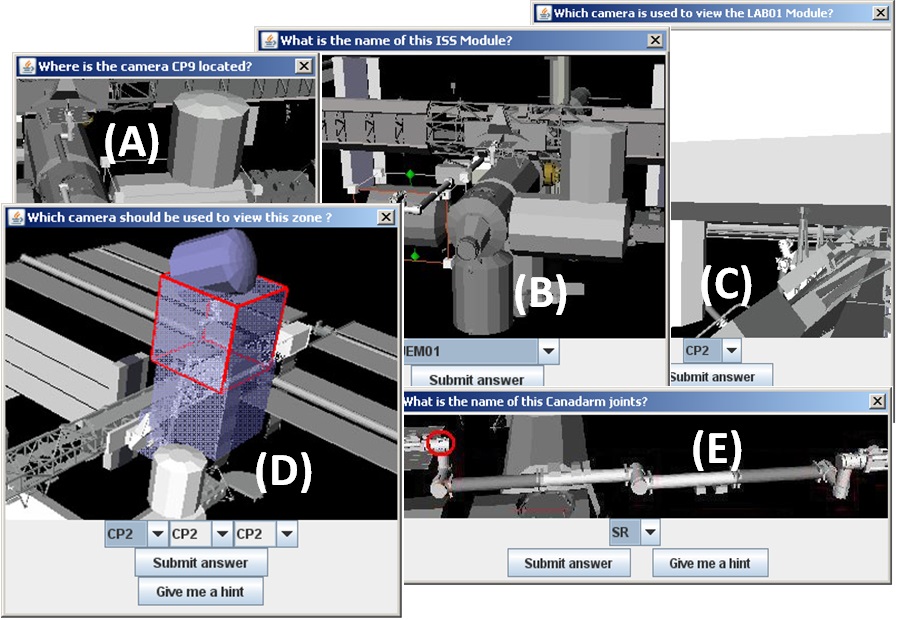
- a cognitive model (Fournier-Viger et al, 2008): this module is based on cognitive theories of spatial cognition. It assesses the spatial reasoning and spatial representations of the learner and generate custom exercises, feed-back, proactive help, .
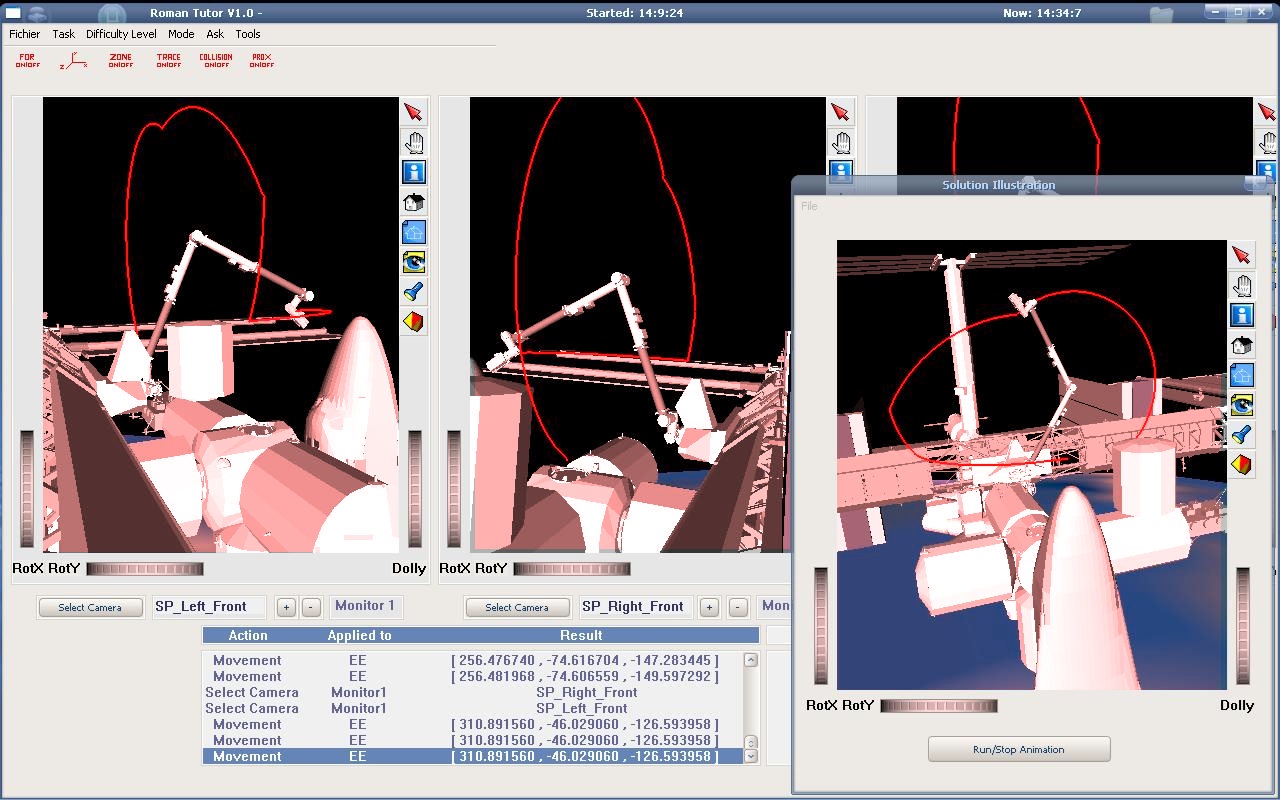
- a path-planner (Belghith et al., 2006): it is an expert system that can generate demonstrations to the learner.
- a data mining-based approach (Fournier-Viger et al., 2010): this module generate recommendation to the learner and assess the learner skills and profile based on previous learner solutions. To do that, it rely on a custom sequential pattern mining algorithm that extract patterns common to several learner solutions.
- a pedagogical module (Faghihi et al., 2011): this module is an intelligent agent named CELTS. This agent attempts to reproduce the interactions that a human trainer would have with a student. It is based on theory of cognition for attempting to simulate the behavior of a human trainer.
- the CanadarmTutor user interface
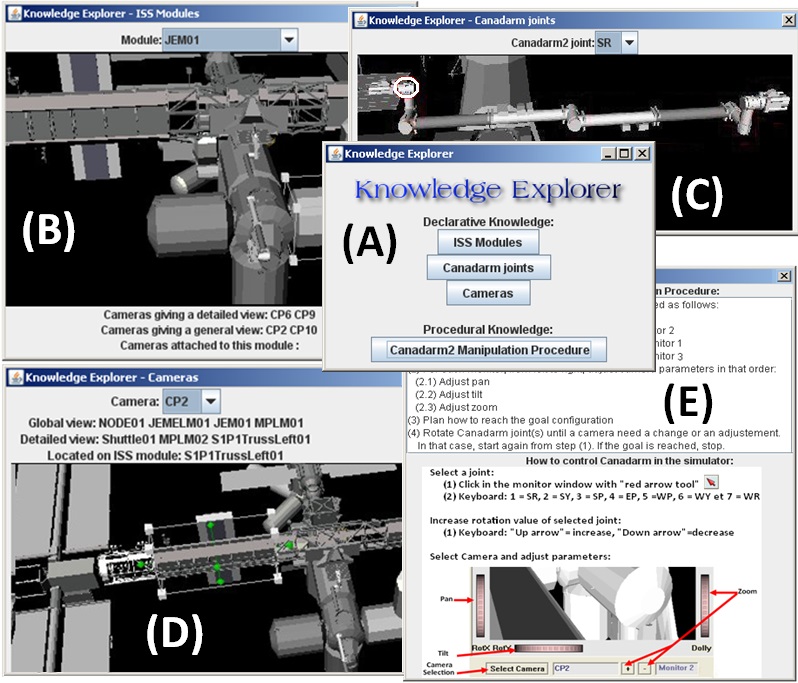
- the Knowledge Explorer module
- the path-planner module
- the Space Quiz module
CanadarmTutor is implemented in C++ with some modules implemented in Java.
There are four main intelligent modules in CanadarmTutor that allows him to provide intelligent assistance to learners.
Some high resolution pictures of CanadarmTutor can be found here:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Videos
Here is a video showing an early version of the data mining module used in CanadarmTutor. In this video, the learner asks what he should do next to move the robotic arm to the goal. CanadarmTutor uses previous learner solutions to recommend actions to the learner.
Here is a video showing the path-planner that was integrated in CanadarmTutor to automatically generate paths that the learner could follow (cf. Belgith et al, 2006).
Articles
There have been several articles published about CanadarmTutor. Here, I only mention the ones that I have participated to.
| [1] | Fournier-Viger, P., Nkambou, R., Mayers, A., Mephu Nguifo, E & Faghihi, U. (2012). Multi-Paradigm Generation of Tutoring Feedback in Robotic Arm Manipulation Training. Proceedings of the 11th Intern. Conf. on Intelligent Tutoring Systems (ITS 2012), LNCS 7315, Springer, pp.233-242. |
| [2] | Fournier-Viger, P., Nkambou, R. & Mephu Nguifo, E. (2010). Building Intelligent Tutoring Systems for Ill-Defined Domains. In Nkambou, R., Mizoguchi, R. & Bourdeau, J. (Eds.). Advances in Intelligent Tutoring Systems, Springer, p.81-101. |
| [3] | Fournier-Viger, P., Nkambou, R. & Mephu Nguifo, E. (2010). Learning Procedural Knowledge from User Solutions To Ill-Defined Tasks in a Simulated Robotic Manipulator. In Romero et al. (Eds.). Handbook of Educational Data Mining, CRC Press, p. 451-465. |
| [4] | Faghihi, U., P. Fournier-Viger & Nkambou, R. (2012). A Computational Model for Causal Learning in Cognitive Agents. Knowledge-Based Systems, Elsevier, 30, 48-56 |
| [5] | Faghihi, U., Poirier, P., Fournier-Viger, P, & Nkambou, R. (2011). Human-Like Learning in a Cognitive Agent. Journal of Experimental & Theoretical Artificial Intelligence, Taylor & Francis, 23(4): 497-528 |
| [6] | Fournier-Viger, P., Nkambou, R., Mephu Nguifo, E. (2009). Exploiting Partial Problem Spaces Learned from Users' Interactions to Provide Key Tutoring Services in Procedural and Ill-Defined Domains. Proceedings of the 14th Intern. Conf. on Artificial Intelligence and Education (AIED 2009). IOS Press. pp. 383-390. |
| [7] | Nkambou, R, Fournier-Viger, P. & Mephu Nguifo, E. (2009). Improving the Behavior of Intelligent Tutoring Agents with Data Mining. IEEE Intelligent Systems, 24(3):46-53. |
| [8] | Fournier-Viger, P., Nkambou, R & Mephu Nguifo, E. (2008), A Knowledge Discovery Framework for Learning Task Models from User Interactions in Intelligent Tutoring Systems. Proceedings of the 7th Mexican International Conference on Artificial Intelligence (MICAI 2008). LNAI 5317, Springer, pp. 765-778. |
| [9] | Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008). Evaluating Spatial Representations and Skills in a Simulator-Based Tutoring System. IEEE Transactions on Learning Technologies, vol. 1, no. 1, pp. 63-74, Jan-Mar, 2008. |
| [10] | Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008), Evaluating Spatial Knowledge through Problem-Solving in Virtual Learning Environments. Proceedings of the Third European Conference on Technology Enhanced Learning (EC-TEL 2008). LNCS 5192, Springer, pp 15-26. |
| [11] | Fournier-Viger, P., Nkambou, R., Mayers, A. and Dubois, D. (2007), Automatic Evaluation of Spatial Representations for Complex Robotic Arms Manipulations. Proceedings of the 7th IEEE International Conference on Advanced Learning Technologies (ICALT 2007), pp: 279-281. |
Acknowledgements
The work that I have done in CanadarmTutor was made possible thanks to (1) the support from my research director and co-supervisors during my Ph.D. (2) grants from the FQRNT and NSERC., (3) the work from many other researchers and students in CanadarmTutor and (3) the Canadian Space Agency who let some students attend the astronauts' training.